





By Maia Beaulieu “True peace is not merely the absence of tension; it is the presence of justice.” -Martin Luther King Jr. After decades of fighting, The Civil Rights Act of 1964 ended segregation and granted rights to African Americans, yet nearly 60 years later, we still see explicit and implicit injustice embedded in our political, […]

A “Renaissance” in Research: Can Psychedelics be Used to Treat Chronic Pain?
By: Melina Bindra The healing powers of psychedelics have been used for centuries, from Amazonian healing to Native American ceremonies, where the ingestion of various plant preparations evokes an altered state of consciousness. But over the past two decades, the recreational and medicinal use of psychedelics within the U.S. has noticeably increased. Psychedelics could possibly […]

A Pathological Achilles’ Heel: Flaws in a Revolutionary Cancer Treatment
By: Yichen Zeng One of the fundamental problems of the human immune system lies in the question: “How many lives can one claim before one begins losing their own?” That is, how aggressive can the human immune system be towards pathogens and other invasive microorganisms before it begins to destroy the very being that depends […]
A Viral Twist on Current Brain Tumor Research: Associating Immunogenetics of Antigen Response with Glioma Risk and Survival
By Riya Arul In 1796, the concept of using viral antigen responses was first introduced to create vaccines that protect us from viruses such as smallpox; today, scientists at UCSF have been able to utilize the same concept to enhance our understanding of malignant brain tumors. Gliomas, or glioblastomas, are brain tumors characterized by the […]
Watch Where You Swim: Health Risks to Children Caused by Fecally-Contaminated Water
By Udaiyaa Bommudurai t’s a hot summer morning, and you are roasting in the heat, so you decide to go to the beach. The water is cool and feels amazing against your burning skin. You spend the day swimming and taking a break from the scorching sun. This is the vision many people have in […]
Have We Found the Fountain of Youth?: New Research into Blood Dilution Proves Promising for Rejuvenation Therapies
By: Nitya Sriram For thousands of years, adventurers from across the globe traveled in search of the Fountain of Youth: a spring that would supposedly grant eternal life to those who drink from it. While not quite as thrilling as a magical Fountain of Youth, researchers at UC Berkeley’s Conboy lab in the bioengineering department […]
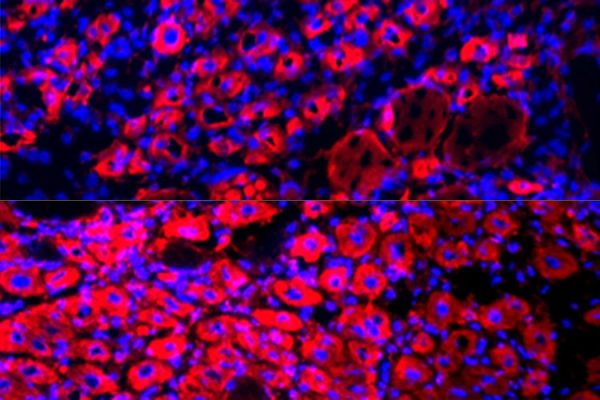
Is Chemotherapy Right for Everyone?: Cancer Cell Markers as Predictors of Chemotherapy Efficacy
By Daniel Voronel Chemotherapy is one of the most common ways of treating cancer but is not always a foolproof method to help patients gain remission. Oftentimes, it is difficult to tell if chemotherapy will actually eliminate cancerous cells or fail to take effect. A recent paper written by Hanbing Song and Simon Bucher et […]

Pregnancy Risks in a Post-Roe America
By Harleen Dhillon How free is America when laws regulate and harm the state of healthcare for women? With the overturning of Roe v. Wade, many women with pregnancy-related cancers will be unable to terminate their pregnancies, which can lead to health risks—even death. Jordyn Silverstein and Katherine Van Loon, two researchers at UCSF, discuss […]

Break Out of Jail: COVID-19 Outbreaks within the Prison System
By Derek Hsu A sentence other than death. Many individuals subjugated to the US incarceration system are exposed to gang rivalries, inhumane conditions, and low staffing levels – a sentence some would argue strips the personality and character of an individual. However, the physical layout of prisons, in particular their outdated building design, are causing […]

Dumpster Diving for Cancer Cells Made Easy: Targeting Cancer Cells With ARS1620 Modified K-RAS (G12C)
By Crystal Chu With an estimated total of 1.9 million new cases in 2022, cancer—the second most common cause of death in the USA—is projected to cause 609,360 nationwide deaths in 2022 [1]. Thus, identifying cancer in its early stages before tumors spread to multiple organs is imperative. However, this task is easier said than […]